
解決方案 Solution
高速公(gōng)路巡檢現狀及面臨的問題
目前,高速公(gōng)路日常養護巡查均依靠人工(gōng)徒步巡查,遇高邊坡、橋梁等結構物(wù),巡查極為(wèi)不便,且危險性較大。特别是遇自然災害,如高邊坡水毀等情況,無法對高位結構物(wù)進行普查,及時獲取相關信息。目前,個别路段通過采用(yòng)無人機,實現了對高危邊坡、橋梁結構的數據采集,但需人員到達現場,通過手搖,對無人機進行控制來獲取信息。無法實現重點、難點部位的周期性巡查。遇路面堵車(chē)情況,養護、路政等人員無法及時趕赴現場,無法第一時間獲取現場情況,影響高速公(gōng)路應急保障能(néng)力。
由此可(kě)見,目前高速公(gōng)路巡檢主要面臨以下幾個問題:
1、 安(ān)全
高速公(gōng)路特殊的外部環境,對進行道路巡檢的人員以及方式具(jù)有(yǒu)相當高的安(ān)全性要求,傳統方式的人員巡檢,必定存在不可(kě)預見的安(ān)全隐患。
2、 效率
高速公(gōng)路超長(cháng)的線(xiàn)路,如果提高道路巡檢的效率顯得尤為(wèi)重要,否則用(yòng)于巡檢的時間過長(cháng),适當巡檢結果變得沒有(yǒu)參考價值,更不具(jù)有(yǒu)時效性。
3、 便捷
高速公(gōng)路上時常會出現突發事件,隻有(yǒu)便捷的巡檢方式,才能(néng)夠真正保障道路的通常。
征途科(kē)技(jì )Skyview系統簡介
該系統是無人機技(jì )術與高速公(gōng)路各行業領域充分(fēn)結合,從實戰出發契合實際工(gōng)作(zuò)需要,實現無人機巡查自動化、後台軟件遠(yuǎn)程控制、圖像等信息傳輸實時化。節約日常巡查人力資源,充分(fēn)利用(yòng)高科(kē)技(jì )、新(xīn)技(jì )術,提升自動化水平,實現“智慧高速、綠色高速”。
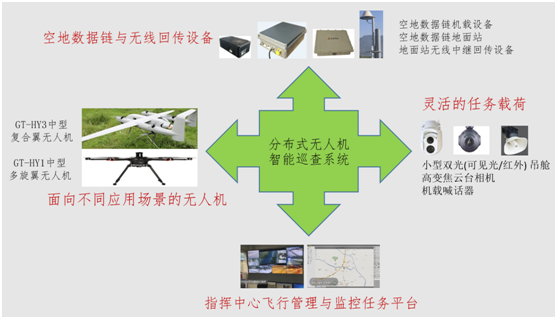
Skyview的系統構成
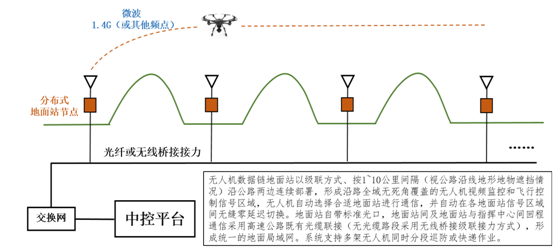
Skyview系統部署拓撲結構
征途科(kē)技(jì )Skyview系統特點
①巡查區(qū)域可(kě)通過布設的分(fēn)布式地面站任意擴展,不受地形地物(wù)限制,實現超視距巡查;
②系統地面站靈活組網且可(kě)擴展,地面回程鏈路支持無線(xiàn)微波、光纖或3G/4G等多(duō)種方式;
③支持無人機低空飛行(<100米)采集高分(fēn)辨率1080p全高清級質(zhì)量視頻;
④巡查圖像實時監控,實時飛行控制,支持無人值守計劃任務(wù)或預定航線(xiàn)飛行巡查;
⑤無人機智能(néng)操控,預設航路/計劃任務(wù)無人機自動起降、按航線(xiàn)自動飛行或人工(gōng)控制航線(xiàn)飛行巡查,大幅降低人員操控技(jì )術要求;
⑥巡查采集信息(視頻圖像和其他(tā)任務(wù)數據)遠(yuǎn)程實時回傳和全網實時共享;
⑦支持多(duō)無人機同時飛行作(zuò)業,支持高密度連續巡查作(zuò)業,支持遠(yuǎn)程對現場喊話;
⑧部署與使用(yòng)方便,支持采用(yòng)低成本小(xiǎo)型化無人機和低成本任務(wù)載荷;
⑨巡檢視頻數據實時多(duō)業務(wù)部門共享,支持手機/Pad實時查看。